commit
226278b2fc
7 changed files with 34 additions and 9 deletions
|
|
@ -16,7 +16,7 @@
|
|||
|
||||
// Battery voltage calibration: connect power source. see <How to calibrate>. write value nr 5 to BAT_CALIB_ADC. make and flash firmware. then you can verify voltage on value 6 (devide it by 100.0 to get calibrated voltage).
|
||||
#define BAT_CALIB_REAL_VOLTAGE 43.0 // input voltage measured by multimeter
|
||||
#define BAT_CALIB_ADC 1704 // adc-value measured by mainboard (value nr 4 on UART debug output)
|
||||
#define BAT_CALIB_ADC 1704 // adc-value measured by mainboard (value nr 5 on UART debug output)
|
||||
|
||||
#define BAT_NUMBER_OF_CELLS 10 // normal Hoverboard battery: 10s
|
||||
#define BAT_LOW_LVL1_ENABLE 0 // to beep or not to beep, 1 or 0
|
||||
|
|
@ -59,12 +59,12 @@
|
|||
|
||||
// ###### CONTROL VIA RC REMOTE ######
|
||||
// left sensor board cable. Channel 1: steering, Channel 2: speed.
|
||||
//#define CONTROL_PPM // use PPM-Sum as input. disable DEBUG_SERIAL_USART2!
|
||||
//#define CONTROL_PPM // use PPM-Sum as input. disable CONTROL_SERIAL_USART2!
|
||||
//#define PPM_NUM_CHANNELS 6 // total number of PPM channels to receive, even if they are not used.
|
||||
|
||||
// ###### CONTROL VIA TWO POTENTIOMETERS ######
|
||||
// ADC-calibration to cover the full poti-range: connect potis to left sensor board cable (0 to 3.3V) (do NOT use the red 15V wire in the cable!). see <How to calibrate>. turn the potis to minimum position, write value 1 to ADC1_MIN and value 2 to ADC2_MIN. turn to maximum position and repeat it for ADC?_MAX. make, flash and test it.
|
||||
#define CONTROL_ADC // use ADC as input. disable DEBUG_SERIAL_USART2!
|
||||
#define CONTROL_ADC // use ADC as input. disable CONTROL_SERIAL_USART2!
|
||||
#define ADC1_MIN 0 // min ADC1-value while poti at minimum-position (0 - 4095)
|
||||
#define ADC1_MAX 4095 // max ADC1-value while poti at maximum-position (0 - 4095)
|
||||
#define ADC2_MIN 0 // min ADC2-value while poti at minimum-position (0 - 4095)
|
||||
|
|
|
|||
33
README.md
33
README.md
|
|
@ -1,7 +1,9 @@
|
|||
This firmware is much better than the old one. tested up to 40A / 60V, no dead board so far :)
|
||||
|
||||
# hoverboard-firmware-hack
|
||||
|
||||
 
|
||||
 
|
||||
|
||||
|
||||
This repo contains open source firmware for generic Hoverboard Mainboards.
|
||||
The firmware you can find here allows you to use your Hoverboard Hardware (like the Mainboard, Motors and Battery) for cool projects like driving armchairs, person-tracking transportation robots and every other application you can imagine that requires controlling the Motors.
|
||||
|
||||
|
|
@ -10,6 +12,15 @@ https://media.ccc.de/v/gpn18-95-howto-moving-objects
|
|||
|
||||
---
|
||||
|
||||
## Build Instructions
|
||||
|
||||
Here are detailed build instructions for some finished projects.
|
||||
If possible, a prebuild firmware release is available for these usecases, so you don't need to compile the firmware yourself
|
||||
|
||||
TranspOtter: https://github.com/NiklasFauth/hoverboard-firmware-hack/wiki/Build-Instruction:-TranspOtter
|
||||
|
||||
---
|
||||
|
||||
## Hardware
|
||||
|
||||
|
||||
|
|
@ -22,7 +33,9 @@ http://vocke.tv/lib/exe/fetch.php?media=20150722_hoverboard_sch.pdf
|
|||
---
|
||||
|
||||
## Flashing
|
||||
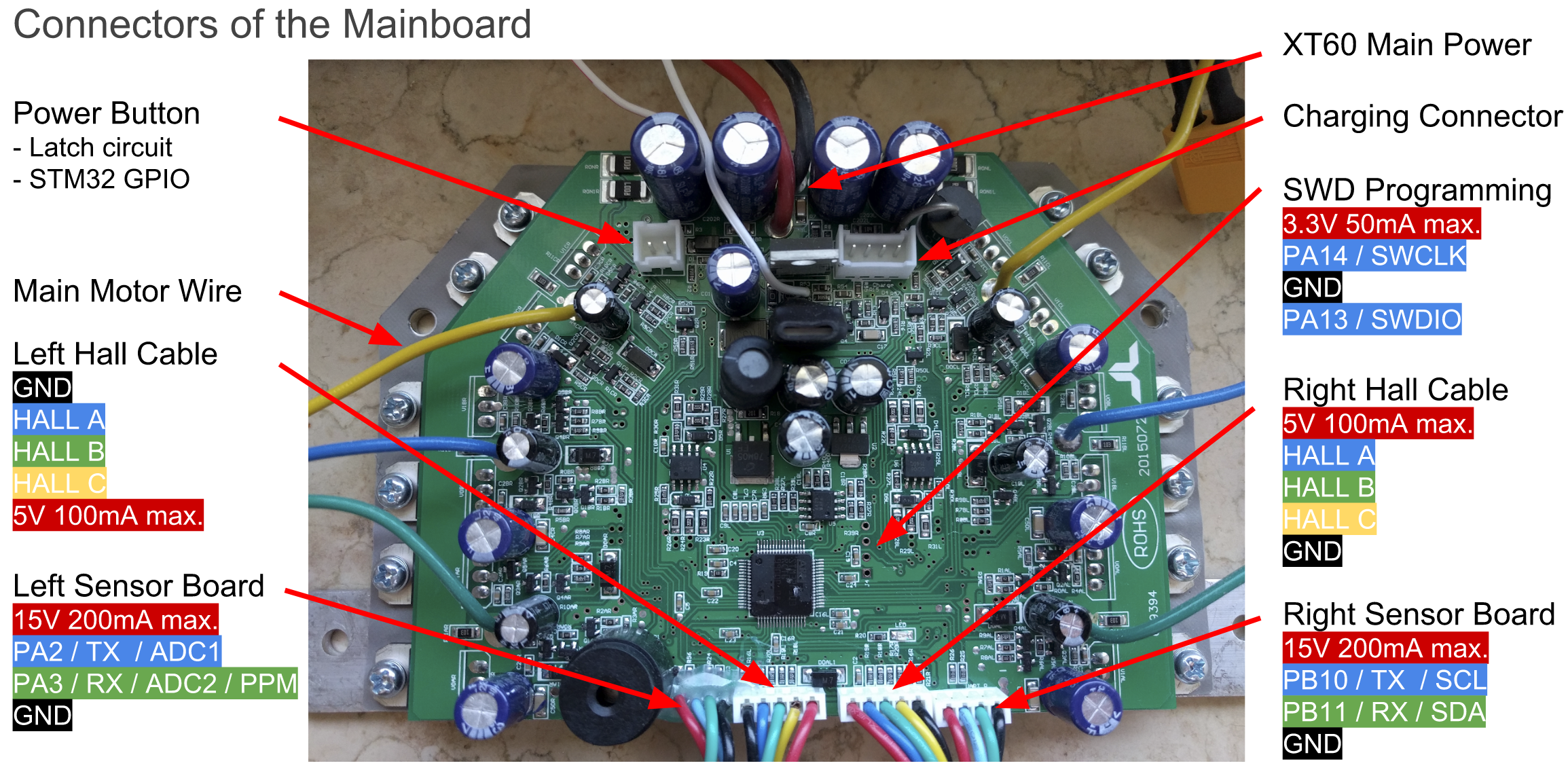
To build the firmware, just type "make". Make sure you have specified your gcc-arm-none-eabi binary (version 7 works, there is a version that does not!) location in the Makefile ("PREFIX = ..."). Right to the STM32, there is a debugging header with GND, 3V3, SWDIO and SWCLK. Connect GND, SWDIO and SWCLK to your SWD programmer, like the ST-Link found on many STM devboards.
|
||||
To build the firmware, just type "make". Make sure you have specified your gcc-arm-none-eabi binary location in the Makefile ("PREFIX = ...") (version 7 works, there is a version that does not!) (if the ons in linux repos do not work, use the official version: https://developer.arm.com/open-source/gnu-toolchain/gnu-rm/downloads). Right to the STM32, there is a debugging header with GND, 3V3, SWDIO and SWCLK. Connect GND, SWDIO and SWCLK to your SWD programmer, like the ST-Link found on many STM devboards.
|
||||
|
||||
Do not power the mainboard from the 3.3V of your programmer! This has already killed multiple mainboards.
|
||||
|
||||
Make sure you hold the powerbutton or connect a jumper to the power button pins while flashing the firmware, as the STM might release the power latch and switches itself off during flashing. Battery > 36V have to be connected while flashing.
|
||||
|
||||
|
|
@ -46,6 +59,10 @@ Then you can simply flash the firmware:
|
|||
```
|
||||
st-flash --reset write build/hover.bin 0x8000000
|
||||
```
|
||||
or
|
||||
```
|
||||
openocd -f interface/stlink-v2.cfg -f target/stm32f1x.cfg -c flash "write_image erase build/hover.bin 0x8000000"
|
||||
```
|
||||
|
||||
---
|
||||
## Troubleshooting
|
||||
|
|
@ -56,7 +73,7 @@ If the motors do something, but don't rotate smooth and quietly, try to use an a
|
|||
|
||||
Nunchuck not working: Use the right one of the 2 types of nunchucks. Use i2c pullups.
|
||||
|
||||
Nunchuck or PPM working bad: The i2c bus and PPM signal are very sensitive to emv distortions of the motor controller. They get stronger the faster you are. Keep cables short, use shielded cable, use ferrits, stabalize voltage in nunchuck or reviever, add i2c pullups. To many errors leads to very high accelerations which triggers the protection board within the battery to shut everything down.
|
||||
Nunchuck or PPM working bad: The i2c bus and PPM signal are very sensitive to emv distortions of the motor controller. They get stronger the faster you are. Keep cables short, use shielded cable, use ferrits, stabilize voltage in nunchuck or reviever, add i2c pullups. To many errors leads to very high accelerations which triggers the protection board within the battery to shut everything down.
|
||||
|
||||
Most robust way for input is to use the ADC and potis. It works well even on 1m unshielded cable. Solder ~100k Ohm resistors between ADC-inputs and gnd directly on the mainboard. Use potis as pullups to 3.3V.
|
||||
|
||||
|
|
@ -67,8 +84,16 @@ Most robust way for input is to use the ADC and potis. It works well even on 1m
|
|||
|
||||
Have a look at the config.h in the Inc directory. That's where you configure to firmware to match your project.
|
||||
Currently supported: Wii Nunchuck, analog potentiometer and PPM-Sum signal from a RC remote.
|
||||
A good example of control via UART, eg. from an Arduino or raspberryPi, can be found here:
|
||||
https://github.com/p-h-a-i-l/hoverboard-firmware-hack
|
||||
|
||||
If you need additional features like a boost button, have a look at the while(1) loop in the main.c
|
||||
|
||||
### Additional Hardware
|
||||
|
||||
* [breakout/interconnect boards](https://github.com/Jan--Henrik/hoverboard-breakout) Breakout/Interconnection boards for hoverboard hacking.
|
||||
|
||||
### Projects based on it
|
||||
* [bobbycar-optimized firmware](https://github.com/larsmm/hoverboard-firmware-hack-bbcar) based on this one with driving modes, acceleration ramps and some other features
|
||||
* [wheel chair](https://github.com/Lahorde/steer_speed_ctrl) controlled with a joystick or using a CC2650 sensortag to control it over bluetooth with pitch/roll.
|
||||
* [TranspOtterNG](https://github.com/Jan--Henrik/transpOtterNG) TranspOtter is an open source semi self driving transportation platform based on hoverboard hardware
|
||||
|
|
|
|||
|
|
@ -25,7 +25,7 @@ void setScopeChannel(uint8_t ch, int16_t val) {
|
|||
}
|
||||
|
||||
void consoleScope() {
|
||||
#if defined DEBUG_SERIAL_SERVOTERM && defined DEBUG_SERIAL_USART3
|
||||
#if defined DEBUG_SERIAL_SERVOTERM && (defined DEBUG_SERIAL_USART2 || defined DEBUG_SERIAL_USART3)
|
||||
uart_buf[0] = 0xff;
|
||||
uart_buf[1] = CLAMP(ch_buf[0]+127, 0, 255);
|
||||
uart_buf[2] = CLAMP(ch_buf[1]+127, 0, 255);
|
||||
|
|
@ -45,7 +45,7 @@ void consoleScope() {
|
|||
}
|
||||
#endif
|
||||
|
||||
#if defined DEBUG_SERIAL_ASCII && defined DEBUG_SERIAL_USART3
|
||||
#if defined DEBUG_SERIAL_ASCII && (defined DEBUG_SERIAL_USART2 || defined DEBUG_SERIAL_USART3)
|
||||
memset(uart_buf, 0, sizeof(uart_buf));
|
||||
sprintf(uart_buf, "1:%i 2:%i 3:%i 4:%i 5:%i 6:%i 7:%i 8:%i\r\n", ch_buf[0], ch_buf[1], ch_buf[2], ch_buf[3], ch_buf[4], ch_buf[5], ch_buf[6], ch_buf[7]);
|
||||
|
||||
|
|
|
|||
BIN
docs/pictures/armchair.gif
Normal file
BIN
docs/pictures/armchair.gif
Normal file
{kind=link}
Binary file not shown.
|
After Width: | Height: | Size: 3.7 MiB |
BIN
docs/pictures/bobbycar.gif
Normal file
BIN
docs/pictures/bobbycar.gif
Normal file
{kind=link}
Binary file not shown.
|
After Width: | Height: | Size: 3.3 MiB |
BIN
docs/pictures/chair.gif
Normal file
BIN
docs/pictures/chair.gif
Normal file
{kind=link}
Binary file not shown.
|
After Width: | Height: | Size: 3.8 MiB |
BIN
docs/pictures/transpotter.gif
Normal file
BIN
docs/pictures/transpotter.gif
Normal file
{kind=link}
Binary file not shown.
|
After Width: | Height: | Size: 5.2 MiB |
Loading…
Add table
Reference in a new issue